MIRSMG4 管理台帳へ戻る
| 名称 |
Arduino のセットアップとデバイス接続 |
| 番号 |
MIRSMG4D-SYST-0003 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2017.04.18 |
牛丸真司 |
牛丸真司 |
初版 |
| A02 |
2020.07.31 |
牛丸真司 |
牛丸真司 |
|
| A03 |
2021.05.25 |
牛丸真司 |
牛丸真司 |
管理台帳フォーマットへの変更 |
Arduino のセットアップとデバイス接続
1. MG4でのAurduino の使用
システム構成図で示されているように、MG4では Arduino でロータリエンコーダのカウントとモータ制御ボードへの PWM 出力、およびバッテリー電圧の
計測を行いる。
MG4では、Arduino 製品のラインアップの
中で最もよく用いられているエントリークラスの Arudino UNO を使用する。
Arduino Uno は、14デジタル入出力ピン14(そのうち6つはPWM出力が可能)、アナログ入力チャネル6の計20個の IOピンを持つ。
また、割り込みに使用出来る2個のデジタルピンがあり、これをロータリエンコーダのカウントに使用する。
2. Arduino の開発環境
3. 使用ポート
- ロータリエンコーダのカウント
- 2ピン, 3ピンをプルアップして、左右のエンコーダのA層の信号を割り込み信号として使用する。 (2ピンが左、3ピンが右)
- 4ピン、7ピンをプルアップして、左右のエンコーダのB層の信号入力して使用する。(4ピンが左、7ピンが右)
- 2ピン、3ピンともエッジトリガの割り込み(CHANGEモード)として使用する。(立ち上がり、立ち下がりで2てい倍して使う)
- 割り込みピンは2本しかなないので、4てい倍は出来ない。また割り込みを必要とするI2C 通信を行うことはなきない。
- PWM出力
- 11ピン、9ピンを使って、モータ制御ボードへの PWM 出力を行う。(11ピンが左、9ピンが右)
- 12ピン、8ピンから方向信号を出力する。
- バッテリー電圧の計測
- アナログの5ピン(19ピン)をバッテリー電圧の入力ピンとして用いる。
- 最大入力電圧は 5V であるため、下記の回路図のように1kオーム抵抗で分圧して 1/2 倍した電圧を入力する。
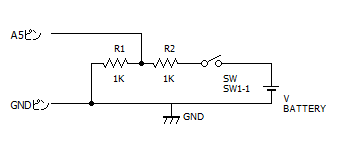
- 速度のフィードバック制御を行う場合は必要ないが、これを行わず duty 比のみで速度を決める
場合には、この電圧値を利用する必要がある。
- 使用ピン一覧
| ピン番号 | 接続デバイス | IN/OUT | 備考
|
|---|
| 2 | 左エンコーダ(A層) | IN | プルアップ、割り込み(CHANGE)
|
| 3 | 右エンコーダ(A層) | IN | プルアップ、割り込み(CHANGE)
|
| 4 | 左エンコーダ(B層) | IN | プルアップ
|
| 7 | 右エンコーダ(B層) | IN | プルアップ
|
| 8 | 右モータ(DIR) | OUT | 方向信号
|
| 9 | 右モータ(PWM) | OUT | PWM信号
|
| 11 | 左モータ(PWM) | OUT | PWM信号
|
| 12 | 左モータ(DIR) | OUT | 方向信号
|
| A5(19) | バッテリー電圧 | IN | 抵抗分圧により1/2倍値を入力
|
4. シールド基板の実装
デバイスとの接続にはArduino UNO用シールド基板を用いる。
- ピンヘッダ
15ピン、8ピンx2 の1列ピンヘッダをシールド基板にハンダ付けする。
ピンヘッダは 2.54mm(0.1インチ)ピッチ 40ピンタイプを切断して使用する。
ピン番号がプリントされている面が上になるように基板実装1のようにハンダ付けする。
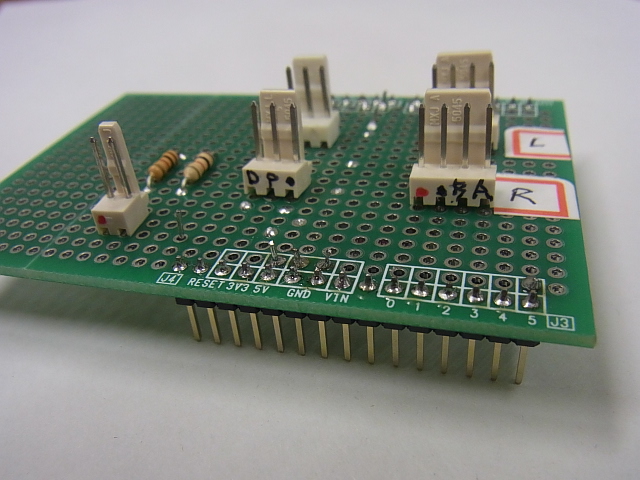
シールド基板実装1
- 実装
信号線、ハウジングを基板実装(表面)、(裏面)のように取り回してハンダ付け実装する。
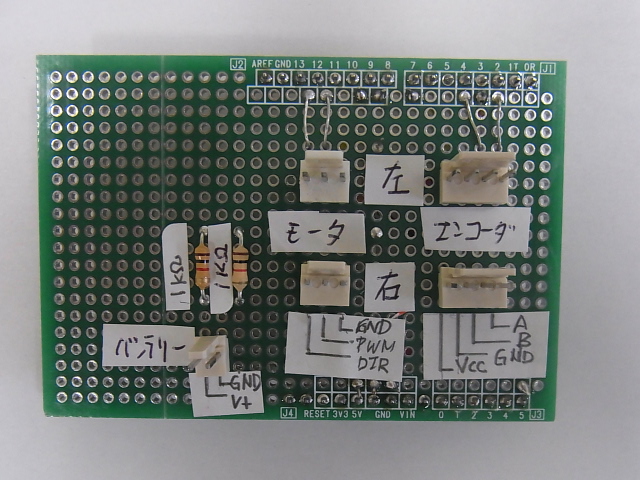
シールド基板実装(表面)
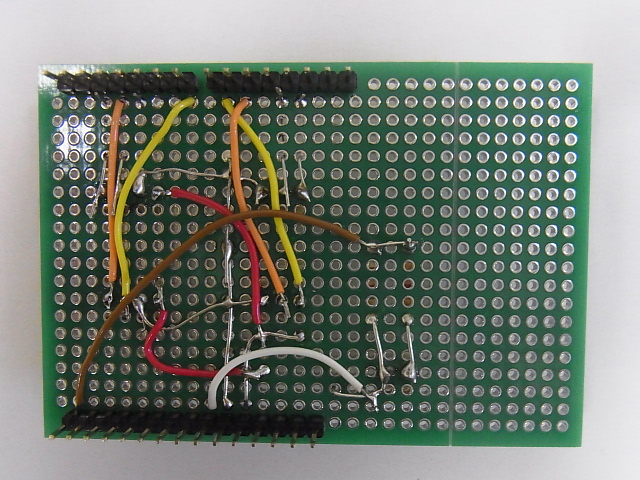
シールド基板実装(裏面)
- 試験
実装後は全ての配線について導通・非導通の導通チェックを行う。
5. Arduino 関連資料
{kind=link}